-
×
 Kit robot chat mignon Open Source Nybble Kitten PetOi OpenCat à monter et à programmer
1 × 329,99 €
Kit robot chat mignon Open Source Nybble Kitten PetOi OpenCat à monter et à programmer
1 × 329,99 €
Sous-total : 329,99 €

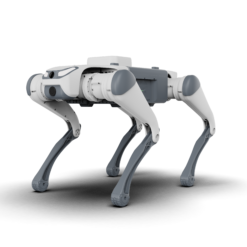
Contactez Leobotics pour un devis robot Quadrupede
Augmentation du couple de joint de 50 %, densité de couple extrêmement élevée, bande passante de réponse, efficacité de transmission inversée
Plus agile et plus réactif ; une plus grande capacité de surmo et une plus grande capacité de manœuvre
Transmission d’image FPV améliorée, moins d’erreurs de décalage
Conception de module supplémentaire applicable pour des modifications illimitées
| Poids (kg) | |
|---|---|
| Charge portée (kg) | |
| Capteurs | Caméra 3D de détection d'obstacles (RGBD), Capteur anticollision à infrarouges, LIDAR |
| Hauteur (mm) | |
| Largeur (mm) | |
| Profondeur (mm) | |
| Image & Vidéo | |
| Durée (h) | |
| Langages de programmation | |
| Systèmes d'exploitation | |
| Inclinaison de sol max (%) | |
| Connexions | |
| Couleurs | |
| Etat / Production | |
| Crédit Photo | |
| Fournisseur | |
| Dernière Mise à Jour |
Seuls les clients connectés ayant acheté ce produit ont la possibilité de laisser un avis.
Robot à programmer
Jouet éducatif programmation Croko Robot crocodile programmable Clementoni
Robot Construction Programmation
Kit robot chat mignon Open Source Nybble Kitten PetOi OpenCat à monter et à programmer
Robot Educatif
Robot Domestique Service Maison
Robot Professionnel
Robot Industriel



Service Robotique
1er magasin physique de robots en France pour une expérience unique !
Robots éducatifs, de service & professionnels 🤖⚙️
Expertise, démonstrations, formations pro & évènements
Un comparateur pour retrouver votre robot idéal 🔎💻
contact@leobotics.fr
Votre publicité ici. Contactez-nous !












Avis
Il n’y a pas encore d’avis.