-
×
 Robot de construction humanoïde main uHandbit Hiwonder micro:bit programmable apprentissage IA
1 × 299,99 €
Robot de construction humanoïde main uHandbit Hiwonder micro:bit programmable apprentissage IA
1 × 299,99 €
Sous-total : 299,99 €




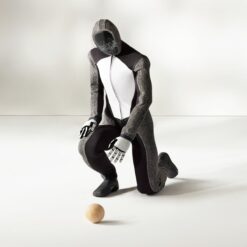
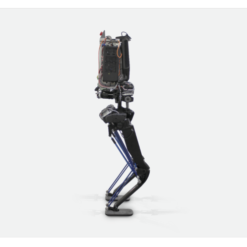
Le robot humanoïde TORO est utilisé pour rechercher le problème fondamental du maintien de l’équilibre. Des algorithmes pour la marche et l’équilibre robustes ainsi que pour le contrôle multi-contacts sont en cours de développement. Tout comme son grand frère Rollin’ Justin, TORO est basé sur une technologie de robot léger.
Plus d'informations sur le Robot Humanoïde DLR Toro
| Poids | 76 kg |
|---|---|
| Dimensions | 174 cm |
| Fournisseur | |
| Nationalité | |
| Site Internet Fournisseur | |
| Crédit Photo | |
| Dernière Mise à Jour |
Robot Educatif
Robot Domestique Service Maison
Robot Professionnel
Robot Industriel



Service Robotique
1er magasin physique de robots en France pour une expérience unique !
Robots éducatifs, de service & professionnels 🤖⚙️
Expertise, démonstrations, formations pro & évènements
Un comparateur pour retrouver votre robot idéal 🔎💻
contact@leobotics.fr
Votre publicité ici. Contactez-nous !